Stuck?  support@mecway.com
support@mecway.com
support@mecway.com
Mecway
FEA
Contact issue work around

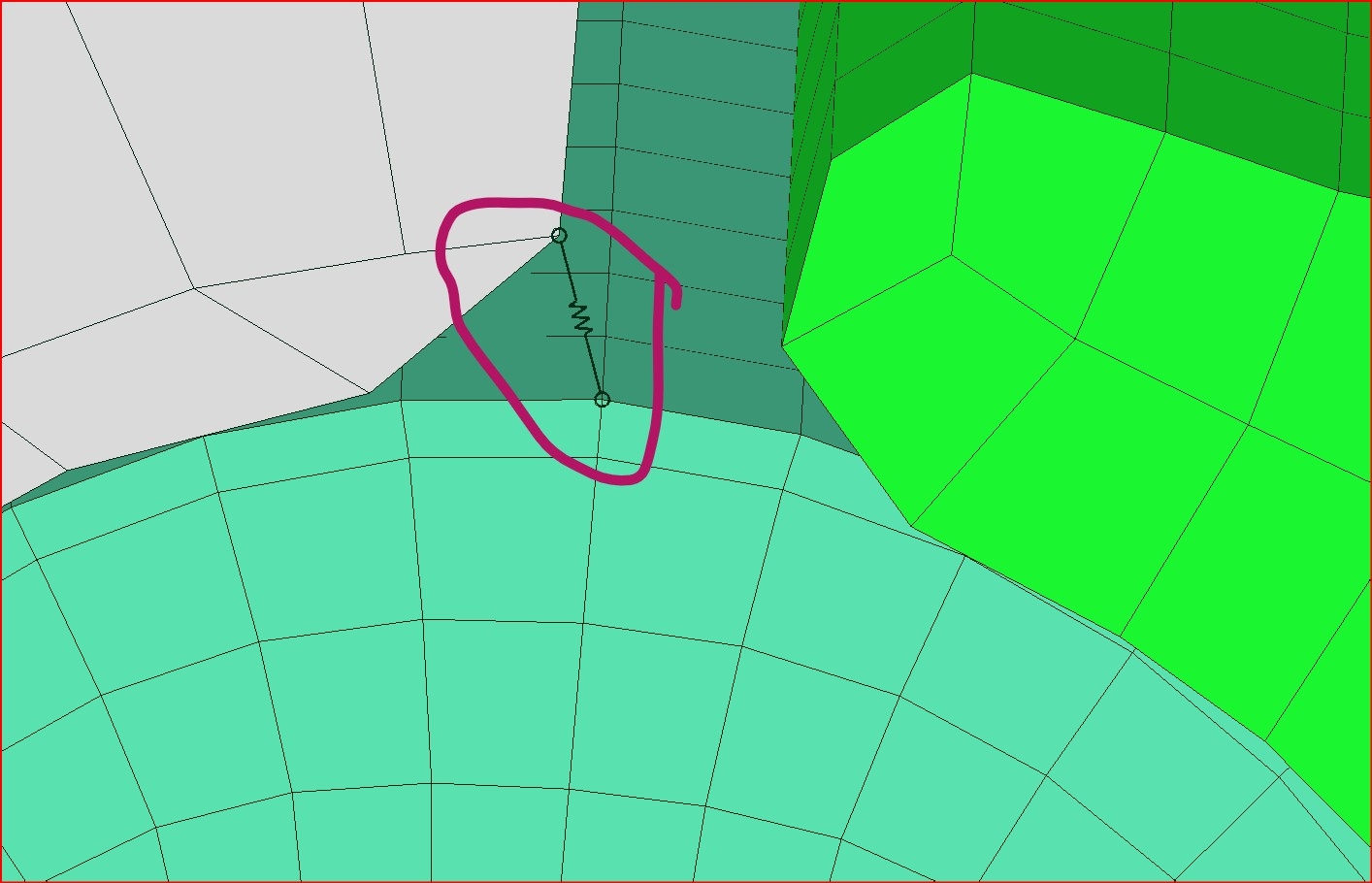
For some time I have struggled to get many of my contact models to run where there is an initial gap present. I have played around with gap materials, different methods or loading the model (force and position control), elastic boundary constraints, moving parts till they touch at the start of the run, and some other wild ideas. Although I generally get the analysis to work in the end, I'm often not altogether satisfied with the approach/solution. Using the adjust card will normally resolve the issue but frequently it is not what I'm after as the gap is part of the geometry I'm trying to model. Any help or tips would be much appreciated. Just recently I've stumbled across a potential work around. I'm working on a 1/2 model of a car running on a track connect by a nylon rod. The rod is under sized and as normal I was having trouble getting the analysis to run. I tried some of my normal tricks but nothing did quite what I wanted. I finally tried attaching a very light spring (25N/m) between two parts in a model where the loads are in the order of 500 kg). To my surprise the model ran as expected! Varying the spring stiffness does change the speed of convergence a little and in this case below a stiffness of about 5N/m convergence is very slow. I did try adding a similar spring at the other end of the rod to see if it would help mode-again to my surprise it stopped it converging! I'm wondering if this is a one off oddity or could be used in other similar situations -I will experiment more but in the mean time would be interested if anyone has had and similar experiences?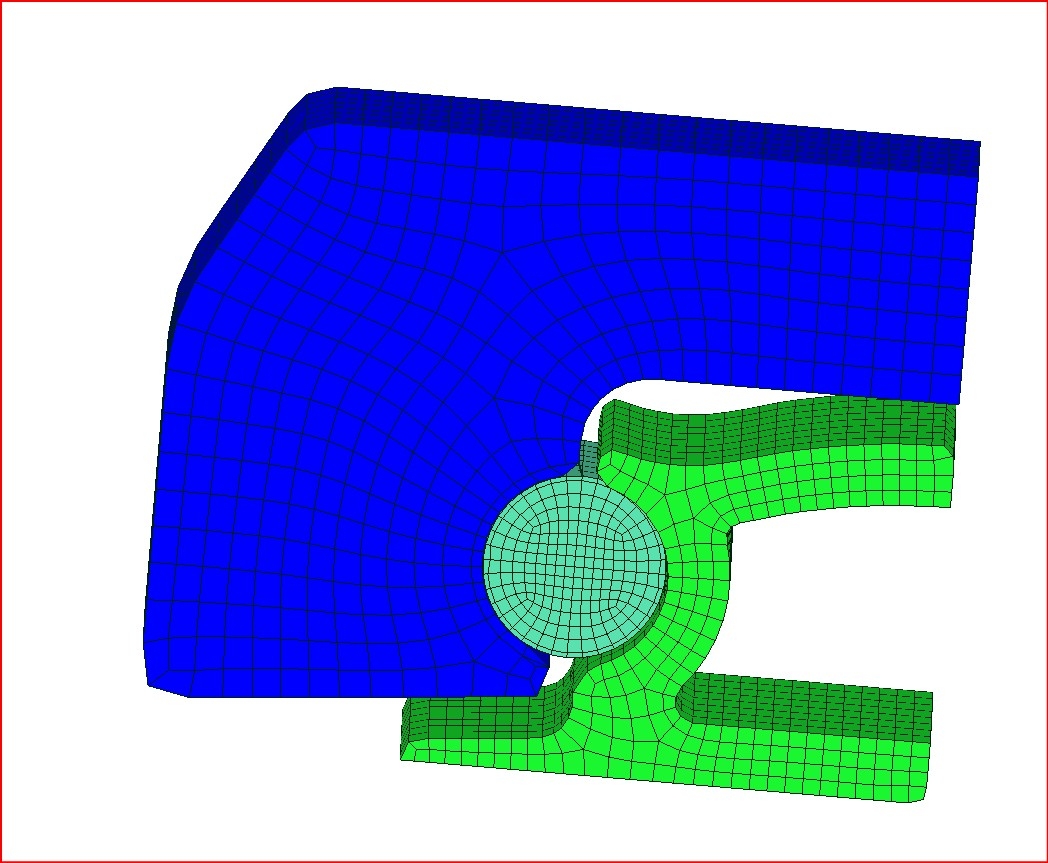
Howdy, Stranger!
It looks like you're new here. If you want to get involved, click one of these buttons!
Comments
Also, increase the contact stiffnesses by a factor of 100 or so because penetration is very high.
I got convergence with:
- No spring
- Elastic support with 100000 Pa/m normal and tangential stiffness per unit area.
- 55500 GPa/m stiffness per unit area in the contacts.
You would still need to make sure the elastic support isn't restraining it too much.
It does sound strange that 0-stiffness springs affect it, but convergence for completely free rigid body motion sometimes does seem to be a matter of luck and not something to rely on.